
Для точной работы устройства необходимо знать расстояние S с точностью до пикселя. Так как выставить камеру в точно заданных параметрах очень сложно, то проводят калибровку каждого устройства в отдельности. Для каждой камеры каждому котангенсу угла присваивают номер пикселя и создают таблицу возможных положений провода.
Рассмотрим левую и правую камеры, геометрические расчеты для которых будут дуальны из-за симметричного расположения относительно оси движения вагона (рис.2.2).
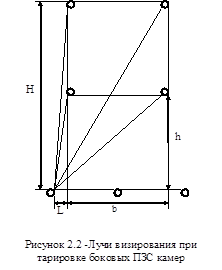
Рис. 2.2
Методика калибровки системы предполагает расположение имитаторов контактных проводов с известными заранее координатами в пределах наблюдаемой области. Калибровка системы проводится по четырем имитаторам для учета возможной нелинейности поля зрения оптической системы ПЗС камеры. Конечным результатом калибровки является таблица котангенсов углов визирования каждой камеры, где каждому углу визирования ставится в соответствие определенный номер пикселя ПЗС камеры. По заданным координатам, решая треугольники, вычислим углы визирования имитаторов:
![]() .
.
Аппроксимируем функцию зависимости углов лучей C визирования от номеров пикселов S линейки ПЗС C=F(S) кривой третьего порядка:
C=A0+A1*S+A2*S2+A3*S3.
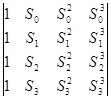
С помощью полученных отсчетов от ПЗС камеры найдем коэффициенты уравнения, подставив номера пикселов в систему уравнений:
C0=A0+A1*S0+A2*S02+A3*S03
C1=A0+A1*S1+A2*S12+A3*S13
C2=A0+A1*S2+A2*S22+A3*S23
C3=A0+A1*S3+A2*S32+A3*S33.
В качестве примера найдем коэффициент A0=D/D0, использую правило Крамера [6]. Где D определитель матрицы четвертого порядка:
 .
.
А D0 определитель матрицы четвертого порядка:
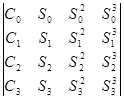 .
.
В реальных условиях для заполнения таблицы используется не сам угол, а его котангенс, который и используется для вычисления декартовых координат КП (смотри выше):
![]() .
.
Выполним аналогичные расчеты для средней камеры (рис.2.3).
Вычисляя углы подвеса имитаторов, решим симметричные треугольники:
![]() .
.
Все остальные расчеты аналогичны боковым ПЗС камерам. Результатом является таблица, где каждому отсчету ставится в соответствие тангенс угла подвеса КП:
![]() .
.
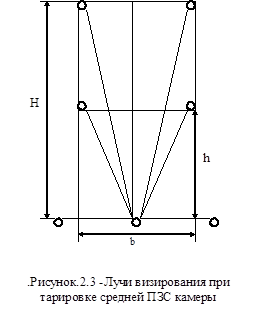
Рис .2.3