Рис.1.
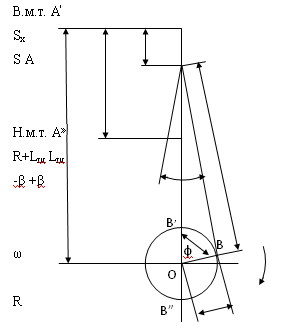
Sx – текущее перемещение поршня (точка А – ось поршневого пальца);
φ – угол поворота кривошипа (ОВ), отсчитываемый по оси цилиндра (А`О) в направлении вращения коленчатого вала по часовой стрелке (точка О обозначает ось коленчатого вала, точка В – ось шатунной шейки, точка А' – в.м.т.);
β – угол отклонения оси шатуна (АВ) от оси цилиндра;
ω – угловая скорость вращения коленчатого вала;
R=ОВ – радиус кривошипа;
S = 2R = А'А" – ход поршня (точка А" обозначает н.м.т.);
Lш = АВ – длина шатуна;
λ = R/Lш – отношение радиуса кривошипа к длине шатуна;
R + Lш = А'О – расстояние от оси коленчатого вала до в.м.т.
Получаем:
λ = 0,28
S = 57 мм; D = 79 мм.
R = 28,5 мм; Lш = 102 мм.
Оптимизация грузопотоков
В связи с ограничением колличества и ассортимента груза у грузоотправителей, решение транспортной задачи по сокращению расстояний перевозки грузов выполняем методом потенциалов по каждому виду груза. Составим матрицы условий. Таблица 2 Вид груза: Пиво «Балтика № 2» ГО ГП Б1 Б2 Б3 Б4 Б5 Наличие груз ...
Основные положения расчета
Расчёт моста ведётся по методу предельных состояний. Предельное состояние – это такое состояние, когда сооружение или его основание под влиянием силовых воздействий перестаёт удовлетворять условиям эксплуатации или затрудняется его эксплуатация. Существует две группы предельных состояний: 1) Предел ...
Описание устройства и работы электромеханического нагнетателя консистентной
смазки
Предлагаемый в данном проекте нагнетатель лишен перечисленных выше недостатков. Он практически полностью исключает использование для смазки ручных шприцев при проведении техобслуживания и текущих ремонтов автомобилей, так как имеет электромеханический привод поршня и обеспечивает высокое давление н ...
