
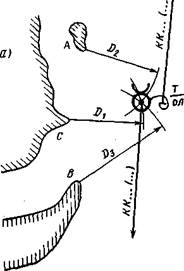
Если на экране РЛС можно выбрать два или три удачно расположенных точечных или характерных ориентира, то место судна может быть получено по измеренным до этих ориентиров радиолокационным расстояниям. Проведя радиолокационные наблюдения, находят на карте ориентиры, соответствующие эхо-сигналам, от которых наносят вблизи счислимого места судна засечки радиусами, равными измеренным расстояниям в масштабе карты. Место судна получают в пересечении засечек (рис. 1, а).
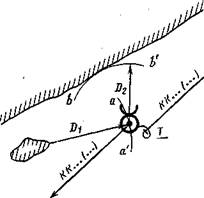
Если на экране индикатора имеется изображение ровной береговой черты, не имеющей характерных выступающих мысов, и одного точечного ориентира, то место судна получают следующим приемом (рис. 1, б). Измерив расстояние D1 до точечного объекта, подводят подвижной круг дальности касательно к кромке берега, т. е. измеряют кратчайшее расстояние D2 до береговой черты. От точечного ориентира радиусом D1 проводят на карте дугу аа''. Взяв циркулем расстояние D2, находят на дуге аа' такое положение острия циркуля, при котором карандаш опишет окружность bb', касательную к береговой черте. Место накола острия циркуля будет соответствовать положению судна. Полученную с помощью РЛС обсервованную точку обозначают кружком с полукругом над ним.
|
|
 Во всех случаях судоводитель должен стремиться определять место судна по трем расстояниям, что дает возможность по величине треугольника погрешностей выявить возможные ошибки в наблюдениях или опознании объектов. Для уменьшения ошибок от неодновременного измерения
Во всех случаях судоводитель должен стремиться определять место судна по трем расстояниям, что дает возможность по величине треугольника погрешностей выявить возможные ошибки в наблюдениях или опознании объектов. Для уменьшения ошибок от неодновременного измерения
Рис. 1. Определение места судна:
а — по радиолокационным расстояниям; б — по точечному ориентиру и ровной береговой черте
расстояний рекомендуется первыми измерять расстояния до объектов, находящихся вблизи траверза. В последнюю очередь измеряют расстояние до ориентиров, расположенных на курсовых углах, близких к 0 и 180°, замечая время и отсчет лага.
Определение места судна по радиолокационному расстоянию и визуальному пеленгу. На практике широко применяют комбинированный способ определения места по радиолокационному расстоянию и визуальному пеленгу. Если пеленг и расстояние измерены до одного и того же точечного ориентира, то определение места выполняется в том же порядке, что и при визуальных наблюдениях.
Часто пеленгуемый маяк располагается на мысу в некотором удалении от берега. Тогда расстояние на экране РЛС измеряется не до маяка, а до лежащей перед ним береговой черты. В этом случае измеренное расстояние откладывают по линии пеленга от уреза воды.
Когда в районе пеленгуемого объекта берег не имеет характерных ориентиров, измеряют кратчайшее расстояние D до береговой черты. Исправив и проложив на карте линию визуального пеленга
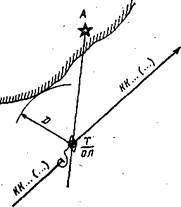
Рис. 2.
растворяют ножки циркуля в масштабе карты на расстояние D. Находят такое положение острия циркуля на линии пеленга, при котором вторая ножка опишет дугу, касательную к береговой черте. Место судна будет находиться в точке накола острия циркуля.
В практике судовождения применяются радиомаяки с ненаправленной или направленной характеристиками излучения. В первом случае для их использования на судне требуется радиопеленгатор, во втором достаточно наличие обычного судового приёмника соответствующего диапазона. Основным параметром, определяющим тип радиомаяка, является его характеристика излучения.
Наиболее широко используются следующие типы:
1. Радиомаяки кругового излучения (ненаправленные);
2. Створные радиомаяки;
3. Секторные радиомаяки;
4. Радиомаяки с вращающейся характеристикой направленности.
Радиомаяки кругового излучения предназначаются для обеспечения навигационных определений в море с помощью судовых радиопеленгаторов. Маломощные маркерные радиомаяки используются, как правило, для обозначения навигационных опасностей или других пунктов, на которых они установлены.
Створные радиомаяки предназначаются для обеспечения вождения судов по прямолинейным фарватерам. Принцип их действия основан на использовании метода равносигнальной зоны. Вождение по зоне осуществляется путём удержания судна в пределах зоны равной слышимости двух сигналов, передающих в "переплёт".