
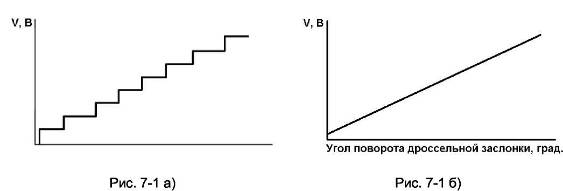
Сигналы датчиков, поступающих в блок управления, могут быть как в форме аналогового сигнала (рис.7-1а) (непрерывно изменяющегося), так и в форме дискретного сигнала (рис.7-1б).
Аналоговые сигналы преобразовываются в блоке управления с помощью аналого-цифрового преобразователя в оцифрованный сигнал (рис.7-2). Полученная информация оценивается в соответствии с алгоритмами управления, находящимися в памяти компьютера. На основе сравнительного анализа поступивших и хранящихся в памяти данных, вырабатываются управляющие сигналы.

В электронной памяти блока управления хранится набор команд по управлению трансмиссией в зависимости от внешних условий движения автомобиля и состояния АКПП. Кроме того, современные системы управления автоматическими коробками передач анализируют манеру управления автомобилем и выбирают соответствующий алгоритм переключения передач.
В результате анализа полученной информации блок управления вырабатывает команды для исполнительных механизмов, в качестве которых в электрогидравлических системах используются электромагнитные клапаны (соленоиды). Соленоиды преобразовывают поступающие к ним электрические сигналы в механическое перемещение гидравлического клапана. Кроме того, блок управления трансмиссией осуществляет обмен информацией с блоками управления других систем (двигателя, круиз-контроля, кондиционера и др.).