
Измерение псевдодальности в навигационных приёмниках осуществляется при помощи коррелятора, в котором в качестве опорных сигналов используются копии ПСП входных сигналов расстроенных по задержке на некоторую величину Δt. Рассчитать значение СКО оценки рассогласования по задержке на выходе дискриминатора канала слежения за задержкой (КСЗ) коррелятора можно исходя из следующих соображений.
В качестве дискриминатора рассматриваем схему с двумя расстроенными по задержке каналами. Типовую величину расстройки каналов Dt выбираем равной ±0,5tпсп. При таком значении Dt, максимальный уровень сигнала на выходе дискриминатора достигается при рассогласовании входной и опорной ПСП на 0,5tпсп. Увеличение рассогласования каналов дискриминатора (вплоть до ±tпсп) приводит к уменьшению крутизны линейного участка ДХ. Максимальный уровень сигнала на выходе дискриминатора в этом случае будет достигаться при рассогласовании входной и опорной ПСП, равном половине расстройки каналов дискриминатора (в пределе ±tпсп). В связи с уменьшением крутизны ДХ, работу дискриминатора с расстройкой каналов ³ ±0,5tпсп следует считать нецелесообразной.
Уменьшение значения расстройки каналов дискриминатора приводит к уменьшению (ограничению) максимального сигнала на выходе, при неизменной крутизне линейного участка дискриминационной характеристики.
Будем рассматривать когерентный режим работы петли автоподстройки времени (АПВ) и использовать в качестве выходного сигнала дискриминатора только синфазную составляющую. В этом случае шумы на выходе дискриминатора будут распределены по нормальному закону с нулевым средним.
Для указанных условий работы, обеспечиваемых в режиме измерения параметров сигнала НКА, выполним расчет шумовых значений расстройки на выходе дискриминатора.
Для определения шумов дискриминатора по задержке используем отношение сигнал/шум (q) в полосе на выходе дискриминатора. При этом под «сигналом», для которого задано отношение сигнал/шум, следует понимать максимальное значение сигнала, которое может быть получено в дискриминационном канале при расстройке его по задержке относительно входной ПСП. Для рассматриваемого случая максимальное значение сигнала достигается при рассогласовании входной и опорной ПСП на 0,5tпсп. Таким образом, максимальное значение амплитуды сигнала на выходе дискриминатора соответствует расстройке 0,5tпсп.
Поскольку «амплитуда» (s) шума в q раз меньше сигнала, то и «шумовые» значения расстройки также будут в q раз меньше максимального значения расстройки. В таком случае, шумовые значения расстройки составят  . Для сигнала ГЛОНАСС данное значение составит σR =
. Для сигнала ГЛОНАСС данное значение составит σR = ![]() [м], для GPS соответственно σR =
[м], для GPS соответственно σR = ![]() [м]. Для сигнала ПС ориентировочно будем использовать значение tпсп аналогичное системе ГЛОНАСС.
[м]. Для сигнала ПС ориентировочно будем использовать значение tпсп аналогичное системе ГЛОНАСС.
Определим величину отношения сигнал/шум q, используя следующее выражение:
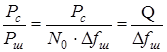 (8)
(8)
Определим полосу пропускания шума ![]() .
.
 (9)
(9)
Значение времени интегрирования примем равным Тинт= 100 мс. Такое значение времени интегрирования может быть использовано в АРН при реализации в фильтре оценки значения задержки режима использования информации о приращении задержки из канала слежения за несущей. Такой режим основан на том, что приращение фазы сигнала на интервалах времени до »30 секунд в точности соответствуют приращениям задержки дальномерного кода и широко применяется в высокоточных образцах современной АРН, например, МРК-11, МРК-22 /8/. На больших интервалах соответствие приращений фазы и задержки может нарушаться вследствие влияния ионосферы.